Autonomous-driving and ADAS teams do not need a pretty map — they need a precise, machine-readable one. So our HD mapping now exports directly to ASAM OpenDRIVE, the open standard simulators and planning stacks already understand, alongside lane geometry, signs and signals as structured features.
From imagery to a routable lane graph
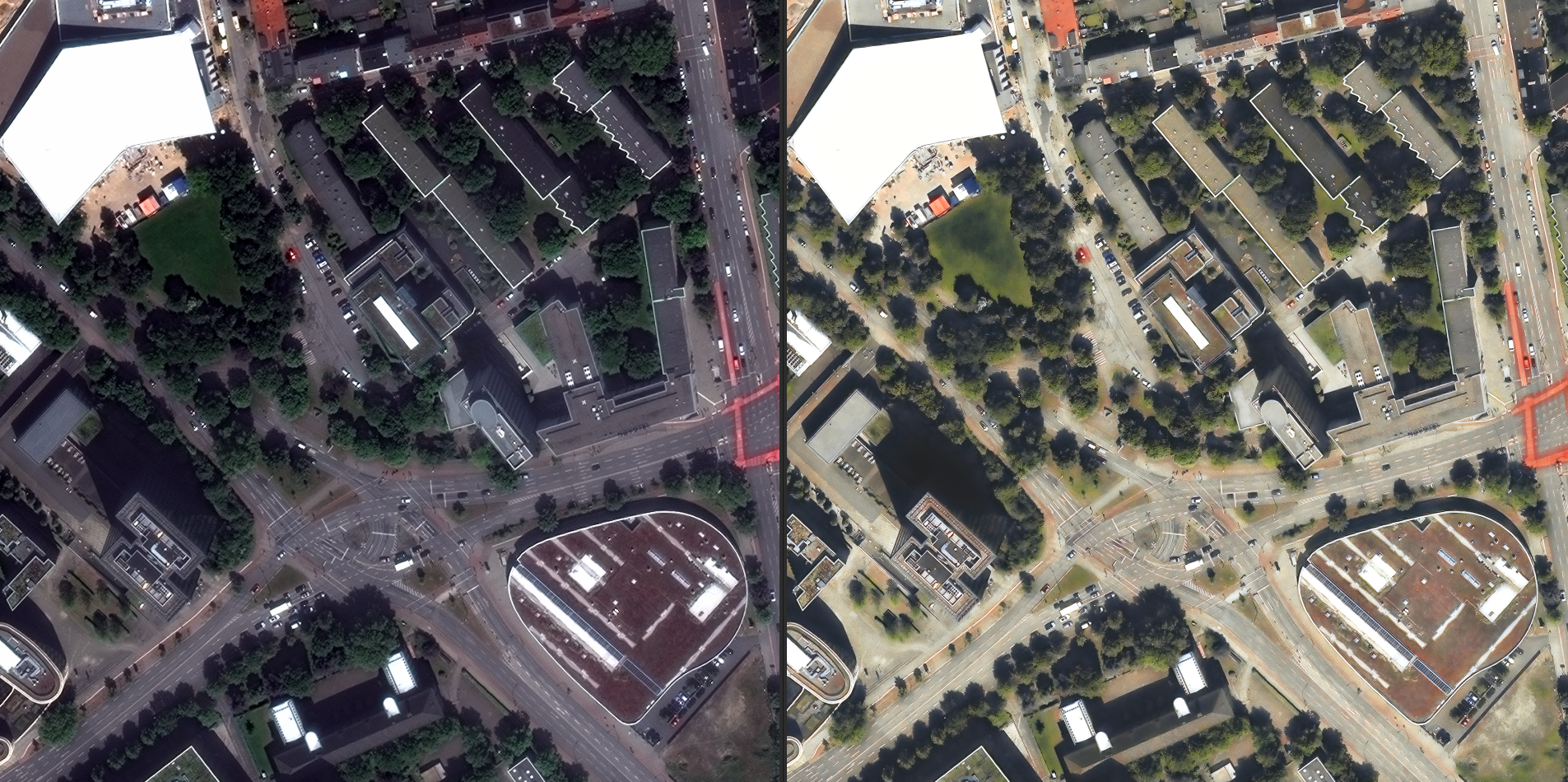
We start from high-resolution aerial and street-level capture, extract lane boundaries, centerlines, road markings, traffic signs and signal heads, then assemble them into a topologically connected network. Every lane links to its neighbours, successors and predecessors, so a planner can route through it — not just draw it.

What you get
- Lane geometry and markings at decimetre accuracy.
- Signs and signals as typed, georeferenced objects.
- Open export — OpenDRIVE for road logic, glTF/CityGML for the surrounding scene.
- A matching 3D environment, so the same map drives both your planner and your simulator.
Because the HD layer is built on the same survey as our digital twin, you can test a route in simulation and recognise the exact junction on the ground. See the HD map demo or book a walkthrough.